Autonomy in Agriculture
|
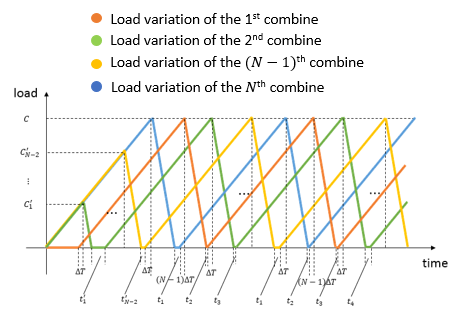
Currently, crop-harvesting is usually performed by agricultural machines called combines (combine harvesters). Due to the limited capacities of the combines, a grain cart is involved for transporting the grains from combines to the depot. If there are sufficient number of grain carts, each combine can go alongside with a grain cart for unloading. However, if the number of combines exceeds the number of grain carts, we have to consider the problem of scheduling the grain carts to unload all the combines. Moreover, most farmers prefer to unload the combine when it is harvesting in order to improve the efficiency. This indeed requires better coordination between the combines and grain cart so that the unloading process can be performed without any interruption. Based on the fact that the grain cart is primarily responsible for unloading grains, we explore the problem of motion planning and scheduling for an autonomous grain cart that serves multiple combines in a field. |
|
|
Phenotypic studies require large datasets for accurate inference and prediction. Collecting plant data in a farm can be very labor intensive and costly. We are deploying distributed modular multi-robot system for row crop field data collection. |