|
Visibility-based Pursuit Evasion Game |
|
|
|
In this project, we investigate the problem of visibility-based target tracking for a team of mobile observers trying to track a team of mobile targets. We consider the tracking strategies for a general environment including the presence of obstacles. Finally, the strategies presented accommodate an arbitrary number of observers or targets. |
|
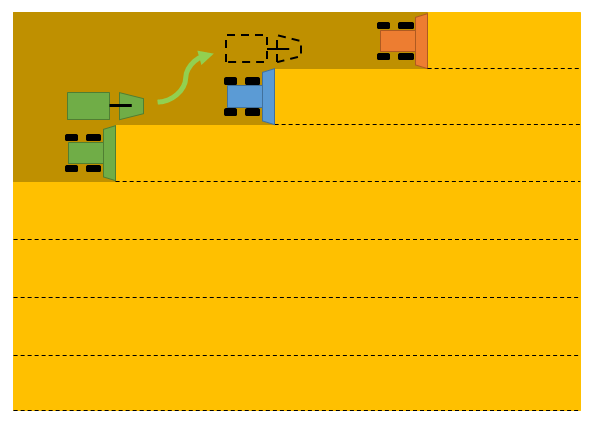
Logistics Path Planning for Agricultural Vehicles |
|
|
Currently, crop-harvesting is usually performed by agricultural machines called combines (combine harvesters). Due to the limited capacities of the combines, a grain cart is involved for transporting the grains from combines to the depot. If there are sufficient number of grain carts, each combine can go alongside with a grain cart for unloading. However, if the number of combines exceeds the number of grain carts, we have to consider the problem of scheduling the grain carts to unload all the combines. Moreover, most farmers prefer to unload the combine when it is harvesting in order to improve the efficiency. This indeed requires better coordination between the combines and grain cart so that the unloading process can be performed without any interruption. Based on the fact that the grain cart is primarily responsible for unloading grains, we explore the problem of motion planning and scheduling for an autonomous grain cart that serves multiple combines in a field. |
|
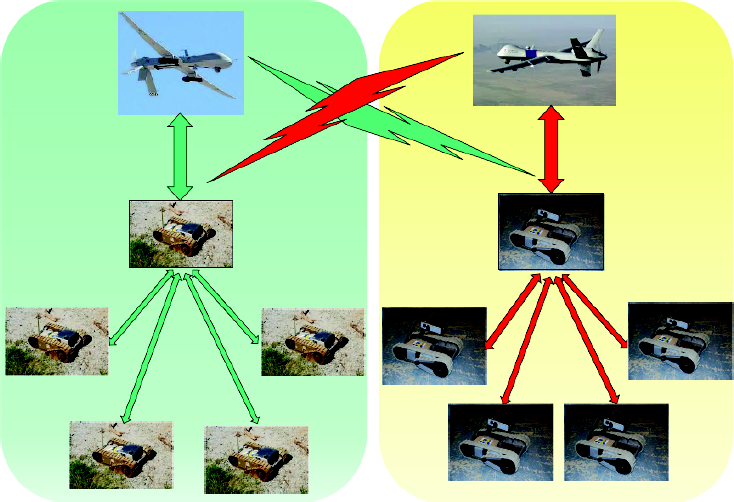
Security for Cyber-Physical Systems |
|
|
Secure communication is an essential requirement in networked cyber physical systems; especially, teams of autonomous vehicles and robots deployed by the army in combat scenarios. The decentralized nature of wireless mobile ad hoc networks makes them vulnerable to security threats. Unauthorized intrusion of such kind has started a race between engineers and the hackers; therefore, we have been witnessing a surge of new smart systems aiming to secure modern instrumentation and software from unwanted exogenous attacks. Our research aims to understand the fine interplay between the constraints in the mobility and communication capability under resource constraints such as onboard energy and available bandwidth, among teams of autonomous agents engaged in adversarial interaction over the communication channel. |
|
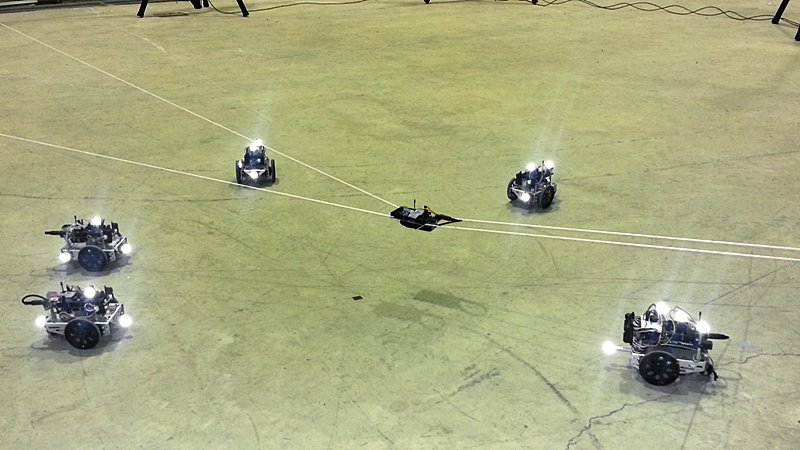
Particle Swarm Optimization for Autonomous Source Seeking |
|
|
We explored the novel idea of implementing Particle Swarm Optimization (PSO) on a swarm of physical mobile robots to conduct a source seeking task. Our focus is on electromagnetic sources which can be cell phone signals or signals from remote control devices. We consider each robot as a particle, and they evolve in the search space looking for the source. To adapt PSO to real robots, we incorporated constraints posed by robot physical limitations into this computational optimization technique. We also explored several PSO variations and how they could be applied to this problem effectively. |